

the first galtea robot
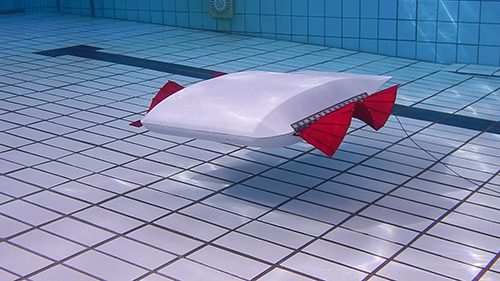
second generation galtea robot
History
The Galatea-project originates from the Design Synthesis Exercise 2007, the Bachelor final project of the faculty of Aerospace Engineering. During this Design Synthesis Exercise two groups were given the assignment to develop a harbour protection system. By means of a swarm of underwater robots the harbour had to be protected against threats. One of the designs for such a system was the PHURA-project. Galatea is the corresponding concept for the AUV.
Between 2007 and 2009 a team of seven students of the faculty of Aerospace Engineering of the Delft University of Technology, designed, developed the first Galatea prototype. To do so the team did measurements on the propulsion system and wind tunnel tests to determine the hydrodynamic coefficents of the robot. All the efforts of the team resulted in the first Galatea robot.
From 2010 onwards the project continued as a research project with two phd students one at the Delft University of technology and one at the Wageningen University. At the experimental Zoology group in Wageningen, the biomechanics of two swimmers are studied: sea horses and cuttlefish. At the biorobotics lab of the TU Delft a new galatea-robot is developed to study undulating fin propulsion. The combination and interaction of both research approaches will result in new insights of this unique propulsion mechanism.